
Peters Sensortasten
von Matthias DD7NT

Sensortaste von DL6DSA für horizontale Tastung
Peter DL6DSA war ein vorzüglicher CW-Operator. Meist benutzte bei seinen CW-QSOs eine seiner Sensortasten.
Wer Peter beim QSO mit DA300CFG noch zuschauen möchte, findet bei Youtube /1/ einen Mitschnitt.
Ich hatte mir 2013 einen Bausatz für eine Sensortaste bestellt. Die fertige Taste zeigte sich dann aber sehr anfällig gegenüber HF-Einstrahlung und ich legte sie wieder beiseite.
Als ich Peters gut funktionierende Taste sah, kamen wir später bei einem OV-Abend auf das Thema zu sprechen.
Peter wollte mir das Innenleben der Taste gern zeigen. Leider kam es dazu nicht mehr.Peter verstarb unerwartet im März 2018.
Aus seinem Nachlass erwarb ich einen seiner beiden Funkkoffer für den Portabeleinsatz. Darin befand
sich eine von ihm gebaute Sensortaste.
Zur Geschichte des Sensorvorsatzes
Der früheste Schaltplan für den Sensorvorsatz in Peters Schaltungsmappe stammt vom 21.08.1995. Der Schaltplan benennt ihn als „Vorsatz für kontaktlose Tastung nach DK6SX“. Der letzte gezeichnete Schaltplan stammt vom 19.11.2014. Beide Schaltpläne unterscheiden sich nur geringfügig. Um etwas mehr zur Entstehungsgeschichte zu erfahren, nahm ich Kontakt mit Willi Grötzinger DK6SX auf. Von ihm erfuhr ich, dass der originale Entwurf aus der Schaltung des 20m QRP-Transceivers „Zenor“ von Matthias Volkert DF4SQ stammt. Die Schaltung wurde in der CQDL 5/1987 /2/ veröffentlicht. Willi hat für den Sensorkeyer eine Platine entwickelt und die Schaltung im Funktelegramm vorgestellt. Auch die AGCW hat sie in einem ihrer Hefte veröffentlicht. Zwischen der Originalschaltung von 1987 und dem Schaltplan von 2014 gibt es keine signifikanten Unterschiede. Damit wird der Sensorvorsatz in dieser Form nun mittlerweile 32 Jahre benutzt.
Ob DF4SQ für den Aufbau des Sensorteils Vorbilder hatte, muss offen bleiben. Seit 1982 gab es von Heathkit den µMATIC-Keyer /3/ in dem eine sehr ähnliche Schaltung verwendet wurde. Hier wird kein Komparatorschaltkreis engesetzt. An seiner Stelle formt der invertierende Hexbuffer MC14049 (U8C) ein Rechtecksignal aus dem mit R12/C11 belastetem Takt. Nachgeschaltet ist wieder ein D-Flipflop MC14013 (U11A) welches das Clock-Signal aus dem Sensorzweig erhält.
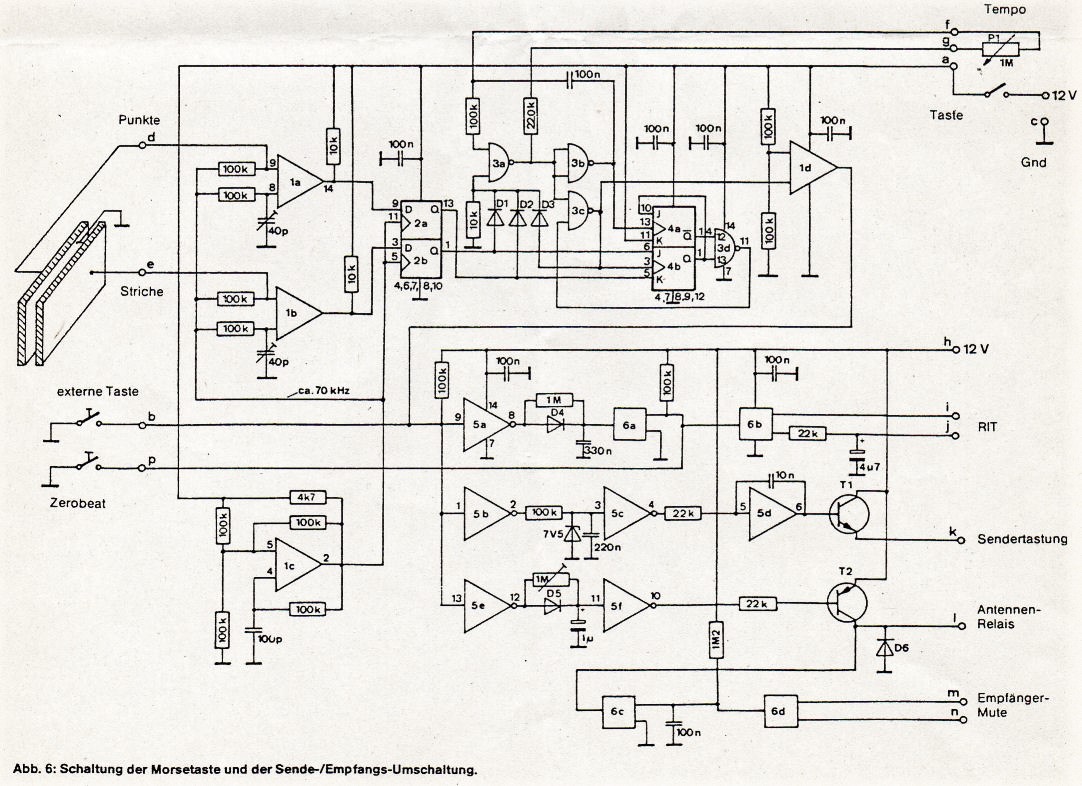
Sensorteil und Keyer des „Zenor“ von DF4SQ aus CQ/DL 5/1987
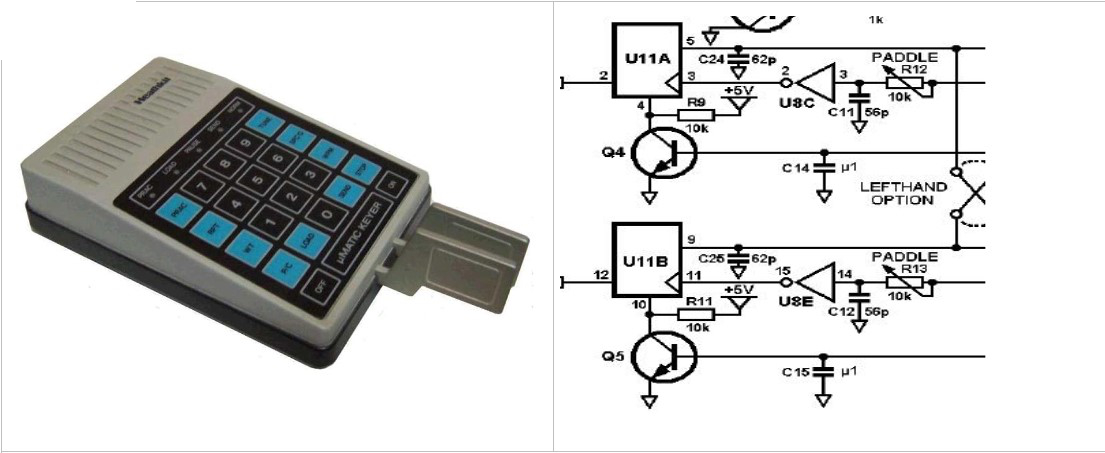
µMatic-Keyer von 1982 aus /3/ mit Schaltplanausschnitt
Die Schaltung
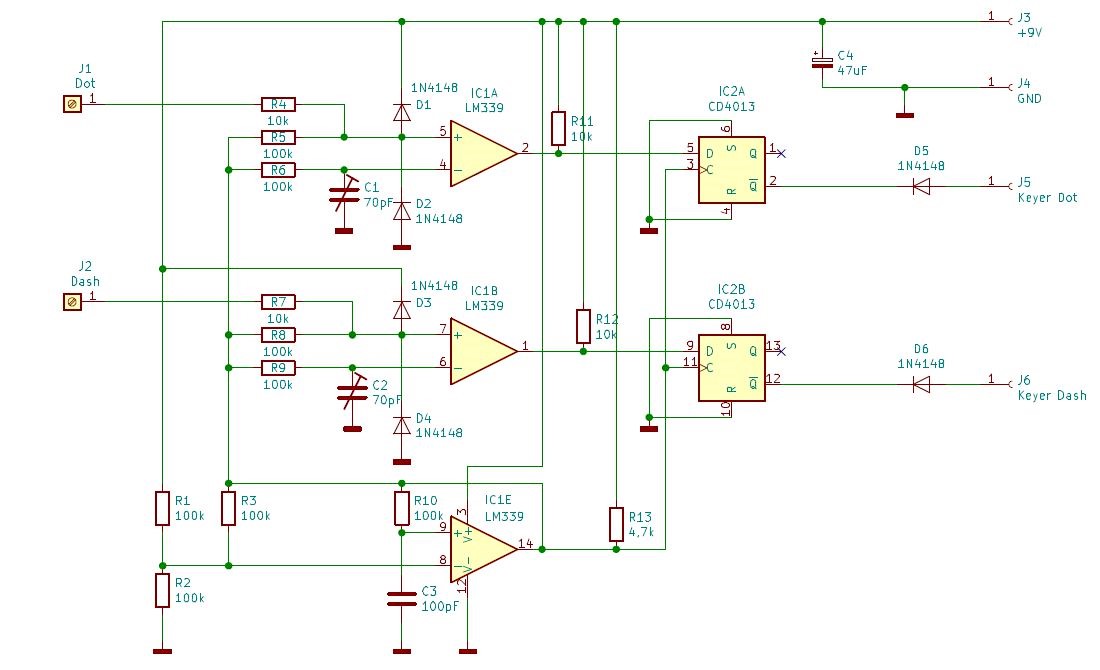
Schaltung des Sensorvorsatzes von DL6DSA, Nachbau zu Messzwecken
Der Sensorvorsatz enthält einen 4-fach Komparatorschaltkeis LM3914 und ein 2-fach D-FlipFlop CD4013. Vom LM3914 wird der Komparator IC1E als Multivibrator verwendet. IC1A und IC1B werten die beiden Tastflächen der Sensortaste aus. Über R10/C3 und R2/R3 wird ein Rechtecksignal mit einer Frequenz von ca. 70 kHz erzeugt, das am Pin 14 des LM3914 anliegt. R11, R12, R13 sind Pullup-Widerstände, die für den High-Pegel an den Ausgängen des LM3914 sorgen. Der LM3914 erzeugt an den Ausgängen über eine Open-Kollektor-Schaltung nur den Low-Pegel an den Ausgängen an den Pins 1,2 und 14. Die Taktfrequenz gelangt über R5, R6, R8, und R9 an die Komparatoreingänge und an die beiden CLOCK-Eingänge der D-Flipflops. Sie wird an den beiden invertierenden Komparatoreingängen jeweils durch C1 und C2 und an den nicht invertierenden Eingängen bei Berührung der über R4 und R7 angeschlossenen Sensorflächen gedämpft. Je nachdem, ob die Sensorfläche berührt wird oder nicht, entsteht am Ausgang des Komparators eine Rechteckfrequenz, die zur Taktfrequenz eine unterschiedliche Phasenlage hat. Die Dämpfung des nicht berührten Paddles muss kleiner sein als die mit dem Trimmer eingestellte Dämpfung des invertierenden Eingangs. Wird das Paddle berührt muss dann die Dämpfung stärker sein als am invertierenden Eingang.
Da das D-Flipflop den am Eingang anliegenden „1“ oder „0“-Wert nur bei steigender Flanke übernimmt, wird am Ausgang bei richtig eingestellten Trimmern C1 und C2 eine „1“ ausgegeben, wenn die Sensorfläche berührt wird und eine „0“ sonst. Am Zweistahloszilloskop stellt sich die Funktionsweise folgendermaßen dar.
Verhalten bei nicht berührter Sensorfläche
Der nicht belastete Sensoreingang liefert ein etwas steilflankigeres Signal als der invertierende Eingang der hier anstelle des Trimmers mit einem Festkondensator mit 47p belastet wurde. Als Ergebnis entsteht am Komparatorausgang ein Signal, das dem Taktsignal etwas nacheilt. An der steigenden Flanke des Taktsignals liest das D-Flipflop immer eine „0“.
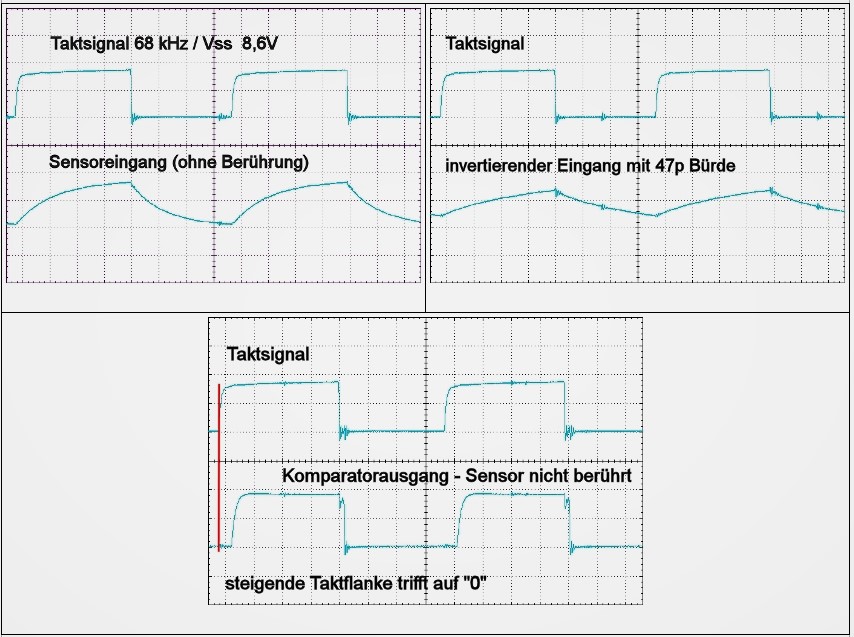
Signalverläufe bei nicht berührter Sensorfläche
Verhalten, wenn die Sensorfläche berührt wird
Der nicht invertierende Eingang hat nun durch Berührung eine höhere Bürde als der nicht invertierende Eingang Das Signal ist stark eingeebnet. Als Ergebnis am Komparatorausgang ergibt sich ein Signal, dass dem Taktsignal vorauseilt. Das D-Flipflop liest an der steigenden Flanke immer eine „1“ aus.
Signalverläufe bei berührter Sensorfläche
Die Trimmer müssen so eingestellt werden, dass das Signal bei nicht berührter Sensorfläche steilflankiger als das Signal des invertierenden Eingangs ist. Bei berührter Sensorfläche muss das Signal jedoch flacher als das Vergleichssignal sein. Die Einstellung ist auch ohne Oszillografen möglich. Die originale Abgleichanleitung schlägt vor, zwischen Sensorfläche und Finger ein dünnes Stück Papier zu legen und die Kapazität am Trimmer dann so weit zu vergrößern, bis das D-Flipflop von „0“ auf „1“wechselt.
Anstelle der Trimmer kann man auch Festkapazitäten verwenden, die man evtl. zunächst auf Lötstifte setzt. Die Größe der Sensorfläche spielt für die Einstellung eine Rolle.
Hinter den invertierten Ausgängen der beiden D-Flipflops kann man direkt den Keyerschaltkreis setzen. Dann verwendet man, wie im Schaltplan gezeichnet 2 Dioden, die die Eingänge des Keyerschaltkreises herunterziehen, wenn die Sensorfläche berührt wird. Auch andere Lösungen sowie der direkte Anschluss des Sensorvorsatzes an einen Transceiver ist – z.B. über Optokoppler – möglich.Einstrahlfestigkeit
Die Einstrahlfestigkeit entscheidet wesentlich über die Einsatzmöglichkeiten eines Sensorvorsatzes. Ein erster Test mit einem Dipol in 3,5m Höhe direkt über der Sensortaste wurde auf 28MHz durchgeführt. Der Sensorvorsatz arbeitete zuerst frei auf dem Tisch stehend. Bis 65W PEP erfolgte die Tastung korrekt. Bei höheren Leistungen schaltete der Keyer auf Dauerton.
Auf dem Gehäuse des Transceivers oder des Antennentuners stehend oder mit der Hand berührt, verkraftete der Sensorvorsatz höhere Einstrahlungen. Der beim Test verwendete TS480HX liefert 200W. Davon zeigte sich der Sensorkeyer mit Handkontakt oder auf dem TRX oder Tuner aufliegend unbeeindruckt. Für Portabeleinsätze ist eine solche Taste damit gut geeignet. Als Keyer eignen sich die K1EL oder PK3/PK4 Keyer auf Basis von PIC-Prozessoren. Ich verwendete als Keyer einen ATTiny13 mit einem eigenen einfacheren Programm. Das für den Test verwendete Audiokabel von der Taste zum TRX war eine „Normalausführung“. Das Kabel für die Betriebsspannung des Keyers war nicht geschirmt. Hier sollten besser geschirmte Kabel zum Einsatz kommen.
Moderne Sensorschaltkreise
Für Amateurzwecke ist die Kombination aus Komparatorschaltkreis und D-FlipFlop mit ihrer sparsamen Beschaltung völlig ausreichend. Man kann aber auch auf Sensorschaltkreise wie z.B. den ATMEL AT42QT72 zurückgreifen. Diese arbeiten nicht mehr mit einer festen Taktfrequenz sondern mit “spread-spectrum charge-transfer“ und haben viele andere Vorteile (Autokalibrierung, einstellbare Empfindlichkeit, Driftkompensation, besserer Schutz gegen statischer Überspannung. Eine interessante weiterführende Lektüre dazu ist der „ATMEL – Touch Sensors Design Guide“ /4/.
Quellen:
/1/ https://www.youtube.com/watch?v=hS0scwjK3lo
/2/ CQDL 5/1987 p. 298
/3/ https://www.dl0bn.de/dc7xj/Anleitungen/Heathkit%20SA-5010A%20Manual.pdf
/4/ ATMEL – Touch Sensors Design Guide www.farnell.com/datasheets/1504633.pdf