











")
Wie baue ich mir eine passende CAT ?
von Matthias Zwoch, DD7NT
Meine Hauptbetriebsart ist und bleibt CW. Aber ich arbeite auch gern einmal Stationen in digitalen Betriebsarten. Für die Verbindung von Rechner und Transceiver habe ich anfangs eine CAT vom Typ SB 2000 verwendet. Eines Tages habe ich das Audiosignal, das vom Transceiver zur CAT gelangt mitgeschnitten. Neben den arbeitenden Stationen war darin auch sehr deutlich der Datenverkehr zwischen CAT (computer aided transceiverinterface) und Transceiver über die RS232-Schnittstelle zu hören. Ein Wunder, dass man mit solchen Störungen noch Stationen dekodieren kann und ein limitierender Faktor für schwächere Stationen. Ich habe dann die SB2000 untersucht und festgestellt, dass auf der Transceiverseite der für das RS232-Protokoll verwendete Schaltkreis MAX232 und die Audioseite nach den beiden Trenntransformatoren eine gemeinsame Masse haben. Über diese Masse schlugen die schnellen Umladevorgänge im MAX232 auf das Audiosignal durch. Da die Masseverbindung an mehreren Stellen bestand, wurde die SB2000 in den Ruhestand geschickt und eine eigene CAT gebaut. Auch einige andere Wünsche gingen in das kleine Projekt ein.

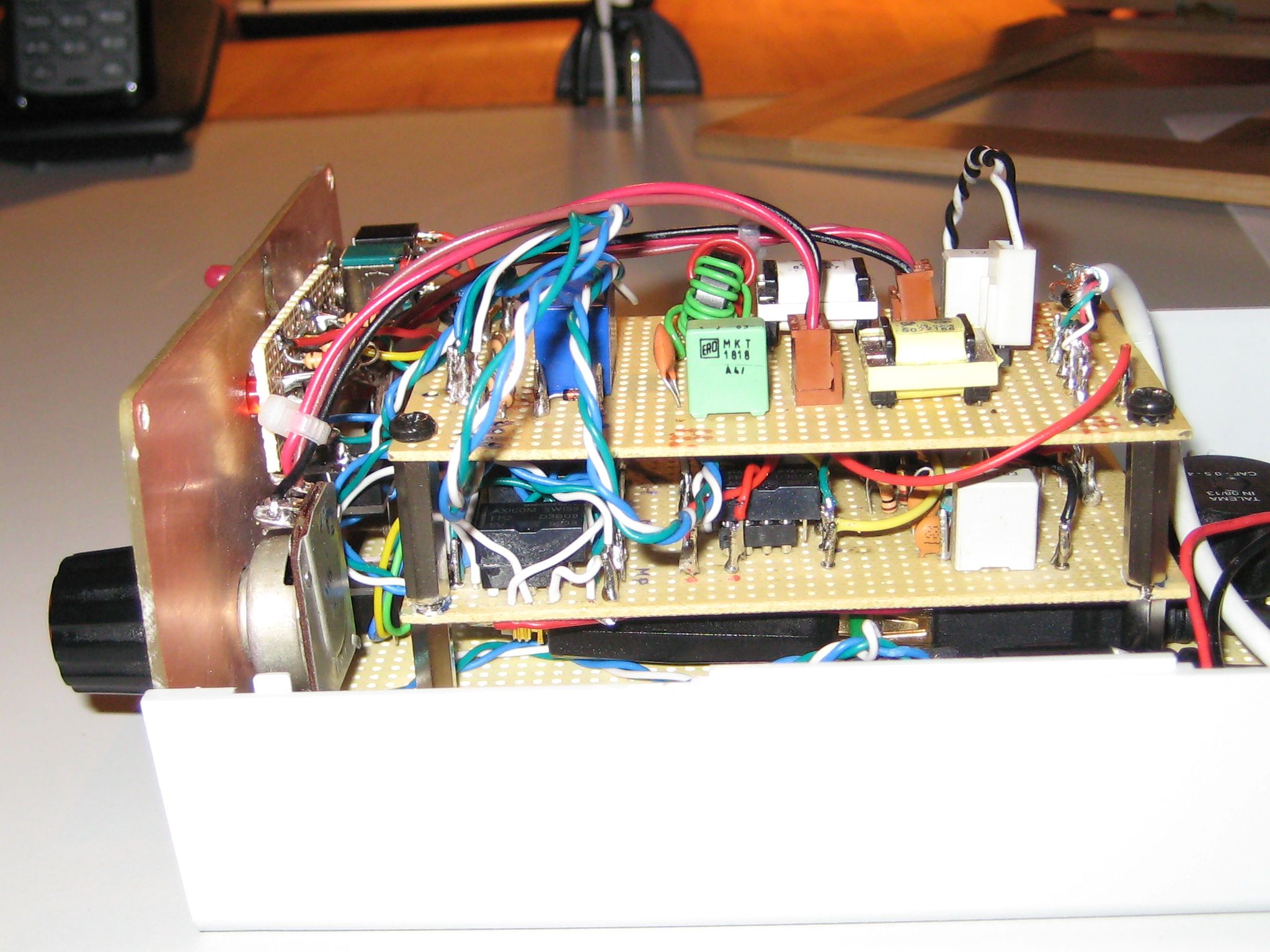
Rechts mittig der FTDI-Schaltkreis, daneben der DC/DC Wandler zur Versorgung des MAX232 auf der TRX-Seite, Mitte oben 4 Optokoppler für RS232 Signale, links der MAX232.
Es gibt unzählige Schaltpläne für CATs. Ich will keine weitere Bauanleitung hinzufügen. Ich will vielmehr dazu anregen, zu überlegen wie man für seine speziellen Bedürfnisse die passende CAT baut. Ich habe das experimentell probiert, indem ich Teilschaltungen auf kleinen Lochrasterplatten aufgebaut und nach Bedarf kombiniert habe. Die Schaltungen der einzelnen Bausteine sollen nur als Beispiele dienen, man kann sie nachbauen, aber sicher kann man noch vieles verbessern.
Die Bausteine einer CAT sind:
- Digitalzweig zur Steuerung des Transceivers
- PTT-Steuerung, die entweder vom Digitalteil oder vom Audioteil ausgehen kann
- Audiozweig mit galvanischer Trennung der Audiosignale von Transceiver und PC
- sonstige Dinge wie Mithörton u.a.
Der Digitalzweig einer CAT
Der Transceiver wird heute meist über eine USB-Verbindung angesteuert. Rechner oder Laptops mit einer RS232-Schnittstelle sind kaum noch zu bekommen. Ausgangspunkt ist daher in fast allen Fällen ein USB-RS232-Adapter der die über USB kommenden Signale wandelt und im RS232-Protokoll ausgibt. Diese werden über Optokoppler galvanisch getrennt zum Transceiver geleitet. Die Spannung für die Transceiverseite wird zumeist über einen DC/DC-Wandler gewonnen um auch hier die galvanische Trennung zu gewährleisten. Für die Pegelanpassung sind Schaltkreise wie z.B. der MAX 232 nachgeschaltet.
Auf der Transceiverseite sind folgende Protokolle gebräuchlich:
- „echtes“ RS232 Protokoll (Kenwood)
- CIV / CT17 Protokoll (Icom)
- FIF 232C – Protokoll (Yaesu)
An dieser Stelle soll zuerst das originale RS232-Protokoll behandelt werden. Mit meinem TS480 habe ich das Glück, dass dieser damit arbeitet. Alle übrigen Protokolle können mit Zusatzschaltungen davon abgeleitet werden.
RS232 für Kenwood Transceiver
Eine gute Beschreibung des RS232-Protokolls bis hin zur Pinbelegung an den Steckern und Buchsen liefert /1/. Hier nur eine Kurzfassung:
- Der Datenverkehr erfolgt über die Leitungen RxD, TxD. Bezugspotential für alle Signalleitungen ist GND.
- Eine logische „0“ wird durch -12V, eine „1“ durch „+12V“ dargestellt. Der Standard lässt für die Spannungen weite Toleranzen zu – die Geräte oft nicht. Das RS232-Protokoll ist ein leistungsloses Protokoll. Nennenswerte Schaltleistungen sind nicht verfügbar. Zum Durchschalten eines Transistors oder eines Optokopplers genügt die verfügbare Leistung.
- Es gibt kein Taktsignal. Sender und Empfänger müssen auf denselben Takt – d.i dieselbe Baudrate eingestellt werden. Üblich und praktisch ausreichend sind 9600 Bd (Bit/s). Manche Transceiver lassen einen deutlich schnelleren Datenverkehr zu. Eine hohe Frequenz beim Datenverkehr kann durch die Umladevorgänge bei der Pegelwandlung aber zu Störungen führen. Die Baudrate muss im Menü des Transceivers und am Rechner (Systemsteuerung → Gerätemanager → Anschlüsse COM / LPT → USB Serial Port COMx → Eigenschaften → Anschlusseinstellungen) auf denselben Wert eingestellt werden. Ebenso der Wert für „Stoppbits“. Für die verwendete Decodersoftware gilt: wenn auch dort die Baudrate / die Stopbits einstellbar sind, wird sie auch da mit dem am Transceiver eingestellten Wert voreingestellt. Die Decodersoftware kann die RS232-Einstellungen eines Ports beim Öffnen des Ports festlegen. Nicht alle Decoder tun das aber.
- Für die Synchronisation des Sendens und Empfangens von Daten gibt es die Leitungen RTS und CTS. Über eine „1“ an RTS zeigt die Sendeseite an, dass sie Daten senden möchte. Die Empfangsseite setzt dann CTS auf „1“, wenn sie empfangsbereit ist. Dieses einfache Hardwarehandshake sichert, dass der Sender nicht bereits wieder Daten übermittelt, während der Empfänger noch mit der Verarbeitung der vorhergehenden Nachricht beschäftigt ist. Für die Kommunikation zwischen Rechner und Transceiver benötigt man das Hardwarehandshake im Grunde nicht. Sender ist immer der Rechner. Dieser sendet seine Daten in festen Zeitabständen (Polling) und wartet jeweils bis der Transceiver antwortet. Wenn man die Pollingrate im Decoderprogramm nicht zu hoch wählt, ist der Datenverkehr auch ohne Hardwarehandshake stabil. Es gibt auch einige Decoder, die schnelles Polling nicht vertragen. Für WSJTX sollte man z.B eine langsame Pollingrate (4-5s, Settings → Radio Poll Intervall) wählen.
Viele Transceiver benötigen kein Hardwarehandshake. Wo es erforderlich ist (z.B. Kenwood TS480 ) Verbindet man die Anschlüsse RTS und CTS transceiverseitig im Stecker mit einer Drahtbrücke. Der TRX sieht dann seine eigene Sendeanforderung als Sendegenehmigung und legt los. Bei manchen Decodern und Steuerprogrammen ( MixW, HRD5) kann man RTS rechnerseits permanent auf „1“ setzen. Dann sieht der Transceiver an CTS ebenfalls ständig die Sendeerlaubnis. Da das RTS und CTS rechnerseits weiter zur Verfügung stehen, können sie für andere Zwecke genutzt werden. RTS kann bei vielen Programmen zum Schalten der PTT verwendet werden (MixW, JT65HF-Comfort als „alternate PTT Method“). Manche Programme gestatten auch die Zuordnungen der Leitungen DSR oder DCR für die PTT oder die Steuerung des CW-Signals. Das wird im Abschnitt PTT betrachtet. - Wahl des richtigen Verbindungskabels: Für die Kommunikation müssen jeweils RxD mit TxD der Gegenstelle sowie RTS mit CTS der Gegenstelle verbunden werden. Verband man früher zwei Rechner miteinander über die serielle Schnittstelle brauchte man somit ein sogenanntes Null-Modem-Kabel /2/ mit „gekreuzten“ Anschlüssen. Bei der Verbindung von Rechner und Transceiver kann aber die „Kreuzung“ von RxD nach TxD usf. auch hinter der RS232-Buchse das Transceivers liegen. Dann braucht man ein Modemkabel mit „gerader“ 1:1 Zuordnung der Leitungen. Hier hilft nur – Manual lesen!
- Wahl / Aufbau des RS232-Adapters: Hier sollte man auf FTDI-Schaltkreise setzen. Dann hat man keine Treiberprobleme. Ab Win7 bis zum aktuellen Windows 10 werden diese Schaltkreise (sofern es sich nicht um Fälschungen handelt) problemlos erkannt. Das ist mit anderen Produkten nicht immer gewährleistet. Man kann mit dem FTDI- Schaltkreis und ggf. Schaltungen zur Pegelanpassung seinen RS232-Adapter selbst bauen. Schaltungen dazu gibt es reichlich. Wer es einfacher möchte, kann eines der vielen erhältlichen FTDI-Breakout-Boards bestellen und nur ggf. die Pegelanpassung bauen. Noch einfacher ist der Kauf eines fertigen RS232-Adapters. Ich habe diesen Weg gewählt. Das hat den Vorteil, dass der Adapter einfach zwischen USB-Kabel und RS232-Kabel frei und entfernt vom Audioteil im „Kabelsalat“ hängt und keine Störungen einstreuen kann. Man sollte einen Adapter mit FTDI-Schaltkreis wählen. Wenn der Händler ein Datenblatt zum Adapter anbietet kann man nachschauen ob da ein „isolation level“ im kV-Bereich angegeben ist. Dann kann man sicher sein, dass die galvanische Trennung enthalten ist. Bringt der Adapter kein Rauschen auf den Transceiver und lassen sich die Pegel mit annähernd +/-12V messen, ist die Aufgabe gelöst. Andernfalls schickt man den Adapter zu Händler zurück oder bittet um Umtausch.
CIV / CT17 Protokoll
ICOM hat die Kommunikation zwischen PC und Transceiver dahingehend optimiert, dass kurze Blöcke fester Länge transportiert werden und die Kommandos zur Steuerung durch hexadezimale „Verschlüsselung“ in dieses kurze Blockformat gebracht werden. Dafür genügen dann die für ICOM-Geräte typische niedrige Baudrate von 1200 Baud und ein Stopbit. Wer sich mit dem Protokoll vertraut machen will kann sich das CI-V-Manual von ICOM aus dem Internet herunterladen /3/. Der Signalpegel beträgt für ICOM Geräte 5V. Es wird eine Mono-Audiokabel zwischen TRX und CI-V Pegelwandler verwendet. ICOM vertreibt dafür Fertiggeräte. Der Eigenbau sollte wesentlich billiger sein. Kernstück der meisten Schaltungen ist wieder der MAX232 als Pegelwandler. Die +/-12V Signale RxD vom RS232-Kabel werden. an T1OUT (Pin14) und TxD an R1IN (Pin13) des MAX 232 gelegt. R1OUT und T1IN liefern die 5V Signale, die beide(!) zusammengeschaltet auf die Spitze des CI-V Monosteckers kommen.
Für das geordnete Hin-und-Her der festen Blöcke reicht eine Leitung aus. Diverse Schaltungsbeispiele gibt es z.B. bei /4/. Vermutlich genügt auch ein FTDI-Breakout Board mit 5V-Pegel zur Steuerung ehe man von USB auf RS232 +/-12V und von da zurück auf 5V wandelt.
Yaesu FIF 232C Protokoll
Yaesu verwendet auch ein kompaktes Protokoll mit „Byteverschlüsselung“ und bietet ebenfalls eigene Protokolladapter über den Handel an. Wie bei ICOM wird ein 5V Pegel am Transceiver erwartet. Man kann die Schaltung für den CI-V Pegelwandler der ICOM Geräte verwenden, nur werden R1OUT und T1IN nicht auf ein gemeinsames Kabel gelegt sondern kommen getrennt an den 6-poligen Mini-Din-Stecker für die Yaesu Geräte. Selbstbau sollte auch hier lohnen. Schaltungsbeispiele ebenfalls in /4/:
PTT-Steuerung
Zum Umschalten vom Empfangsbetrieb auf Sendebetrieb und zurück gibt es drei Wege
- Umschalten durch tranceiverspezifische Kommandos
- Umschalten mit einer RS232-Steuerleitung
- Umschalten mit NF-VOX
PTT per Steuerbefehl
Für diese Variante reicht es aus, wenn man den Transceiver über die im vorigen Abschnitt beschriebenen Anschlussvarianten über den oder die benutzten Decoder steuern kann. Leider bieten nicht alle Decoderprogramme für den jeweils verwendeten Transceiver diese Möglichkeit. Selbst wenn der verwendete Decoder den Kommandosatz des Transceivers „kennt“, kann man es erleben, dass der TRX zwar auf Senden schaltet aber das erzeugte Signal „kommt nicht durch“. Das liegt meist daran, dass anstelle des DATA-Eingangs fälschlicherweise der Mikrofoneingang des TRX offen ist. Ein kurzes Pfeifen ins Mikrofon schafft dann Klarheit. In diesem Fall ist im Decoder zum Steuern der PTT das falsche Kommando implementiert und der Mikrofoneingang anstelle der Datenleitung offen Wenn man verschiedene digitale Modi nutzen möchte und dafür verschiedene Decoderprogramme benötigt reicht PTT via CAT-Kommando meist nicht aus.
PTT per Steuerleitung
Hier werden die für den Datenverkehr nicht benötigten Steuersignale des Digitalteils genutzt, um die PTT zu schalten.
Das Prinzip verdeutlicht die folgende Schaltung, die ich testweise aufgebaut habe:
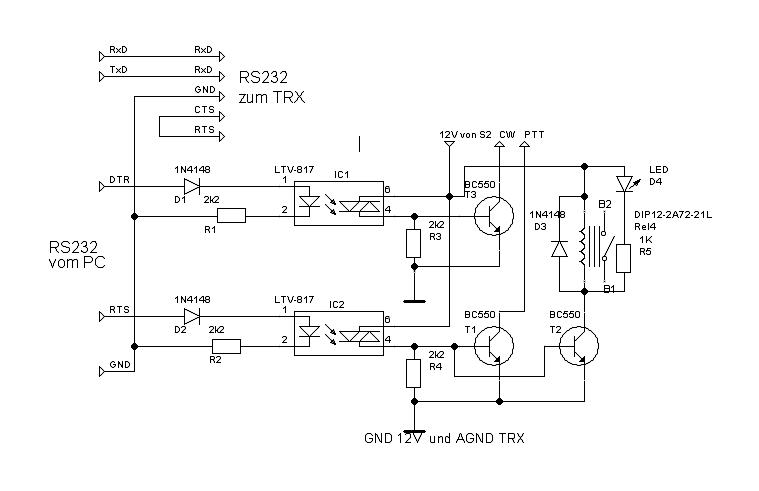
Die Datensignale RxD und TxD werden beim TS480 an den Transceiver durchgereicht, CTS und RTS sind auf der Transceiverseite verbunden und täuschen das Hardwarehandshake vor. Das RTS Signal wird zum Schalten der PTT verwendet. Das DTR-Signal kann verwendet werden, um CW zu tasten. Damit kann man sich bei manchen Kontestloggern (z.B. UCXLog) einen separaten Keyer sparen. Die Dioden D1 und D2 verhindern das die -12V als „reverse voltage“ an die Anode des Optokopplers gelangen, R1 und R2 begrenzen den Strom, der den Optokoppler ansteuert. T1 und T3 arbeiten in Open-Kollektor-Schaltung und ziehen die PTT bzw. tasten CW. T2 steuert ein Reed-Relais, das die Durchleitung des Audiosignals zum Transceiver zu oder abschaltet. Damit wird verhindert, dass neben der PTT auch noch die eventuell aktive Vox des Transceivers das Senden aktivieren kann. Die Led D4 signalisiert, dass die PTT aktiviert ist. Die Versorgungsspannung für Optokoppler, Schalttransistoren und Relais kann über einen Schalter abgeschaltet werden. Mit der expliziten Zuschaltung des Sendebetriebes und dem Ausschluss der Transceiver-VOX kann man ungewollte Aussendungen sicher vermeiden, wenn z.B. bei eingeschalteter CAT eine aufgerufene Webseite bei QRZ ihren Soundtrack startet. Auf die Optokoppler könnte man eventuell verzichten, wenn der USB-RS232-Adapter bereits galvanisch trennt.. Besser ist es aber wenn die PTT-Masse identisch mit der der übrigen Zusatzgeräte (Keyer usf.) und deren zentraler Stromversorgung ist.
Die kleine Schaltung hat mit allen MixW, Fldigi und den diversen WSJT-Decodern gut funktioniert. Einen Haken gibt es dennoch für alle, die gleichzeitig neben dem Decoder ein weiteres Programm zur Steuerung des TRX nutzen und beide Programme miteinander synchronisieren wollen. Ich nutze z.B. Hamradio de Luxe 5.1. das über das Menü Tools -> 3rd Party SerialPort einen zweiten seriellen Port bereitstellt. Ähnliche Konstellationen ergeben sich, wenn parallel zum TRX auch Skimmer, SDRs usf. genutzt werden sollen.
Meine Konfiguration ist in folgendem Bild skizziert:

HRD kann über seine Bedienoberfläche gesteuert werden und erzeugt entsprechende Steuerkommandos für den TRX. Diese werden über den virtuellen COM-Port 3 per USB zum USB-Serial-Adapter übertragen, der sie in RS232-Signale wandelt und zum TRX überträgt. MixW oder JT65HFComfort, UCXLog, WSJTX… benutzen den virtuelle COM-Port 5 den die Freeware Com0Com bereitstellt. Sie fungiert als virtuelles RS232-Kabel und kann mehrere Port-Paare bereitstellen. Das andere „Kabelende“ ist mit COM4 verbunden, der als „3rd Party Serial Port“ in HRD konfiguriert ist. HRD führt zwischen den Anforderungen an COM4 und den eigenen zu übertragenden Kommandos ein Multiplexing durch und bündelt den Strom. Die Pollingraten für das Auslesen der Frequenz und der übrigen Parameter sollten mit Rücksicht auf das Multiplexing moderat eingestellt werden. Während Com0Com (/5/ und /6/ für Win10) ein Nullmodemkabel mit Steuersignalen emuliert, beschränkt sich HRD aus nachvollziehbaren Gründen beim Multiplexen auf die Kommandos des Datenkanals. Die Steuersignale bleiben außen vor.
Damit kann ein Decoder, der über HRD angebunden ist Frequenzen und Betriebsmodi am TRX auslesen oder setzen. Die PTT kann aber durch Setzen von RTS auf „1“ nicht geschaltet werden. Trennt man die Verbindung vom TRX zu HRD und verwendet für den Decoder den TRX-Port direkt, können die Steuersignale verwendet werden.
PTT mit NF-VOX
Lässt man die PTT mit der VOX-Steuerng schalten umgeht man die Klippen, die sich mit PTT via Kommando oder bei der Verwendung von Steuersignalen ergeben können. Man kann entweder die TRX-interne VOX zum Schalten der Datenverbindung nutzen oder man baut eine eigene NF-VOX.
Ich habe längere Zeit mit der Vox des TRX gearbeitet und fand das nicht sehr komfortabel. Da die einzelnen Decoder unterschiedliche Audiopegel benötigen, das ausgehende Signal möglichst genau etwas unter der Ansprechschwelle der ALC gehalten werden muss, ist häufiges Nachregeln des Audiopegels die Folge. Das Arbeiten mit dem Slider für die Soundkartensteuerung ist langsam und das Decoderfenster rutscht jedes mal in den Hintergrund. Wenn man das Audiolevel reduziert hat, kann es passieren, dass man unter die Ansprechschwelle der VOX rutscht und diese nicht anspricht oder schlimmer – es gibt partielle Aussetzer beim Senden. Dann muss VOX-Gain nachgestellt werden. Im übrigen wird – solange die Vox eingeschaltet ist – alles gesendet, was gewollt oder ungewollt die Soundkarte benutzt. Vergisst man das Ausschalten der Vox einmal und landet auf einer Webseite mit Soundtrack, wird man ungewollt zum Störer. Aus diesen Gründen habe ich mir eine NF-VOX selbst gebaut.

Nachdem ich eine Weile mit dem Bauvorschlag aus /7/ experimentiert hatte entschied ich mich für ein Experiment mit einem kleinen Mikroprozessor. Wenn das Audiosignal genügend stark ist oder wie hier verstärkt wird, genügt auch die „klassische“ Schaltung mit Gleichrichtung und Ladekondensator / Entladewiderstand. Der ATTiny13 ersetzt hier den Ladekondensator und man kann per Programm diesem Kondensator besondere Eigenschaften geben. Anstieg und Abfall des Audiosignals können unterschiedlich behandelt werden und auch bei der Glättung des Signals sind größere Freiheitsgrade gegeben.
Über T1 wird das Audiosignal nach dem Trenntrafo des Audioteils etwa 6-fach verstärkt und gelangt über C2 an den Analogeingang PB2 des ATTiny13. D1 clippt das Signal bei 0,7V und R6 sorgt dafür, dass C2 und der interne Ladekondensator der ADC zügig entladen werden, wenn kein Audosignal anliegt. Ein kleines Programm liest die Werte an der ADC ständig aus, glättet sie und bewertet ob ein Signal anliegt oder nicht. Wenn ja, wird die PTT über PB3 gezogen und mit T2 wird erst dann das Audiosignal über ein Reed-Relais an den Transceiver gelegt. Dadurch wird die VOX des Transceivers von der Steuerung der PTT ausgeschlossen.
Nachdem ich an dem Programm für den Mikrokontroller eine Weile gefeilt hatte, konnte ich damit sehr sicher und über einen weiten Dynamikbereich die PTT schalten. Der Quelltext des Programms ist als Anhang enthalten.
Als kritisch erwies sich das Sampling des Audiosignals. Liest man die Spannung an PB2 in einer Loop aus, so erzielt man eine feste Samplingfrequenz. Ist diese oder deren Vielfaches synchron zur Frequenz des Audiosignals, so „trifft“ man immer wieder dieselben Stellen im Audiosignal. Im ungünstigsten Fall immer ein „Wellental“. Dann schaltet die PTT nicht. Man muss daher die Samplingfrequenz mit unterschiedlichen kurzen Wartezeiten z.B. in einer Warteschleifen aus dem Gleichschritt bringen. Das konnte mit der Freeware SineGen 2.1 /8/ gut getestet werden. Programmiert man unregelmäßiges Sampling, so erreicht man eine bessere Verteilung „hoher“ und „niedriger“ Treffer beim Auslesen des Audiosignals und man kann sich an Durchschnittsbildung und Glättung machen.
Die NF-Vox mit ATTiny13 wurde in dieser Form in die fertige CAT übernommen. Wenn man sich die Möglichkeit des Schaltens der PTT per Steuersignal auch erhalten möchte, kann man beide Platinen einbauen und per Jumper oder Schiebeschalter anwählen.
Die mit dem Attiny aufgebaute VOX kann auch für andere Zwecke verwendet werden. Sie wurde inzwischen von einem OM in eine „Freisprecheinrichtung“ für ein Mobilfunkgerät integriert.
Audioteil
Galvanische Trennung von Rechner und TRX
Auch für die Übertragung der Audiosignale zwischen PC und TRX sollte man einige Überlegungen anstellen. Vorab mein Ergebnis:
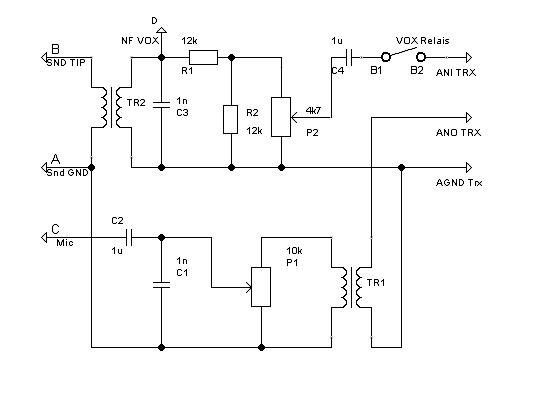
Im oberen Teil der Schaltung ist die Kopplung des TRX-Eingangs (ANI) an den Soundkartenausgang dargestellt. Vom linken Kanal (Spitze) der Soundkarte gelang das Signal über Relais (Bild10) direkt an TR2, der TRX und Soundkarte galvanisch trennt. Nach TR2 wird das Signal über den Spannungsteiler R1 und R2 sowie P2 geregelt und über C4 und das VOX-Relais an den TRX angekoppelt. Regelbare Audiopegel sind ein Muss für eine ordentliche CAT !
Die Werte für R1, R2 und P2 müssen ausprobiert werden. Sie hängen von der Soundkarte oder dem Soundstick ab und auch von den Einstellungen und Eigenschaften der TRX sowie vom verwendeten Trenntransformator. Als Trenntransformatoren eigenen sich solche aus alten 64kBd-Analogmodems oder aus dem Angebot von /9/. R1 und R2 sollen die Spannung für P2 soweit herabsetzen, dass der Regelbereich von P2 für die verwendeten Decoder voll ausgenutzt werden kann. C3 siebt evtl. vorhandene Rest-HF ab. Manche Schaltungsvorschläge enthalten dafür eine auf der TRX-Seite zusätzlich noch eine stromkompensierte Drossel. Dies war hier nicht erforderlich und es kann auch zu Verformungen des Signals führen. Auf eine Zusammenführung des „Stereosignals“ der Soundkarte mit 2 Widerständen wurde hier verzichtet. Sollte ein Decoder sein Signal nur über einen Kanal zur Verfügung stellen (z.B. JT65HF, JT65HF-comfort), kann man ggf. eine Jumper für die Auswahl des Kanals vorsehen.
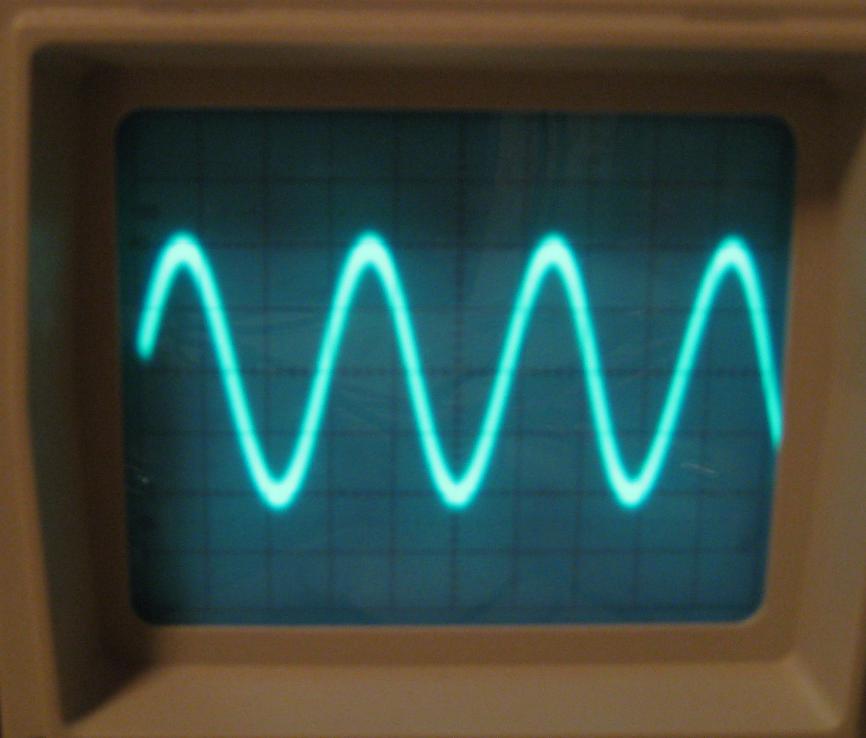
Da die allermeisten Soundkarten für die beiden Kanäle nur einen Digital-Analogwandler (DAC) verwenden und die Kanäle abwechselnd im Multiplexverfahren bedienen wird ein ausgegebenes Summensignal aus den beiden Sinussignalen etwas verformt. (s. Bild 6). Da der DAC zusammen mit einem Komparator auch als Analog-Digitalwandler (ADC) arbeiten kann, muss man bei diesem „interlaced samplig“ damit rechnen,, dass zeitversetzt alle 4 IO-Kanäle der Soundkarte über einen DAC abgewickelt werden. Für die Prozessoren in den Soundkarten ist die nötige höhere interne Taktfrequenz kein Problem. Die Folgen sind meist nicht dramatisch, besser ist es aber nur einen Kanal zu nutzen.
Bild 6 – Sinussignal, getrennte Darstellung der Kanäle bei DAC Multiplexing, bei diesem Soundstick trat eine unerwartet deutliche Zeitverschiebung auf.

Für die NF-VOX wird das Signal dafür hinter TR2 abgenommen. Auf diese Weise erhält die VOX den vollen am PC-Mischer eingestellten Pegel und ist von der jeweiligen Einstellung an P2 unabhängig. Das Durchschalten des Audiosignals über das VOX-Relais zum TRX verhindert, das die VOX des TRX und die NF-VOX der CAT konkurrierend schalten können. Die NF-VOX oder auch eine RS232 gesteuerte PTT-Schaltung bestimmt allein, wann der TRX ein Audiosignal bekommt.
Im unteren Teil ist Kopplung des TRX-Ausgangs ANO an den Mikrofoneingang der Soundkarte dargestellt. Hier reichte ein 10k Potentiometer um feinfühlig regeln zu können. Viele Schaltungen verwenden für C2 und C4 kleinere Werte. Damit werden allerdings höhere Frequenzen im Audiosignal noch stärker bedämpft und man muss öfter nachregeln. Man kann hier auch mit höheren Werten experimentieren.
Welche Soundkarte oder welcher Soundstick
Die meisten Autoren, de sich mit dem Thema CAT beschäftigen betonen, dass man „hochwertige“ Soundkarten einsetzen soll. Ist das wirklich nötig, oder tut es ein billiger USB-Soundstick auch? Und welche Kriterien soll man für die Wertigkeit einer Soundkarte für unseren Zweck ansetzen? Die meisten hochwertigen Soundkarten adressieren den Kundenkreis der Musiker, DJs, HiFi-Liebhaber und Gamer oder punkten mit Audioeffekten. Für eine CAT wäre interessant, dass die Soundkarte eine gute Linearität , ein geringes Eigenrauschen und eine ausreichende Samplingrate aufweist. Über diese Kriterien ist in den meisten Testberichten wenig zu lesen.
Ich habe für die „Bauarbeiten“ zwei preiswerte USB-Soundsticks ( < 10€) eingesetzt, um auszuschließen, dass die rechnerinterne Soundkarte beim Basteln beschädigt werden könnte. Um es vorweg zu nehmen, noch immer tut der preiswertere der beiden Soundsticks seinen Dienst. Man sollte aber nachmessen…
Samplingrate: Auch ein preiswerter USB-Stick schafft die Standard-Sampling-Rate von 48 kHz. Bei einem 1000 Hz-Sinus sind das 48 Samples pro Wellenzug oder 24 Stützwerte pro Halbwelle. Zusammen mit der internen Glättung erzeugt der verwendete Soundstick am Lautsprecherausgang einen ausreichend sauberen Sinus, wenn die beiden Kanäle nicht addiert werden.
Bei 10 KHz sieht das anders aus, aber der TRX kann nur bis 2,3 kHz übertragen. 192 kHz Samplingrate wäre auch nicht schlecht. Soundsticks dieser Kategorie sind preisintensiv.

Wie sieht es am Mikrofoneingang aus? Die Pegel am Mikrofoneingang sind auf dynamische Mikrofone ausgerichtet. Darauf ist auch der TRX eingestellt, so dass das 10k Potentiometer im Audiozweig zur Regelung des Pegels ausreicht. Um das Signal zu analysieren, wurde ein Sinussignal mit /8/ auf dem PC mit der internen Soundkarte erzeugt. Das Signal mit einem auf Kopfhörer ausgerichtetem starken Pegel von 0,7V wurde mit einem Spannungsteiler 47k/1k um 33dB gedämpft, so dass in etwa der Pegel eines PC-Headset-Mikrofons erreicht wird. Es wird dem Soundstick zugeführt und mit der Freeware mit Spectrogram 16 /10/ visualisiert.

Die Ergebnisse zeigen das Hauptsignal mit -30dB als recht saubere Spitze und „Nebengipfel“ um < 90 dB u.a. bei der 1. Harmonischen 2 kHz. Diese lassen sich bei dem improvisierten Test nicht eindeutig zuordnen. Egal, ob sie bei der Erzeugung des Signals entstanden sind oder bei der Abtastung mit dem Soundstick. Mit 60 dB Abstand der Nebenprodukte zum Hauptsignal kann man zufrieden sein. Das Rauschen setzt bei -120 dB ein. Wenn der Soundstick übersteuert wird, tritt bei den Harmonischen des erzeugten Tones der bekannte Lattenzaun kräftig in Erscheinung. Das unterstreicht nochmals die Notwendigkeit schnellen Einstellmöglichkeit des PC-Ausgangspegels.
Es traten mit den Soundsticks aber auch Probleme auf. Der preiswertere der beiden Soundsticks fiel nach kurzer Zeit aus. Auch andere Käufer hatten dieses Problem und berichteten sogar von defekten oder heißen Kopfhörern. Der Verkäufer lieferte für den defekten Stick Ersatz. Beim Nachmessen ergab sich, dass dieser Audiostick eine Offsetspannung von 2V erzeugt, die bei 10K Last nicht einbricht und die der Kopfhörer wegheizen kann. Entweder Kopfhörer oder Soundstick geben dann einmal auf. Offensichtlich passte der Trennkondensator zwischen DAC und Kopfhörerbuchse nicht mehr in das Minigehäuse. Bei dem anderen geringfügig größeren Soundstick trat das Problem nicht auf. Ich habe dann beide Kanäle dem Audioteil der CAT über 100u Elkos zugeführt und das Problem extern gelöst. Den meisten USB-Soundsticks mangelt es an auch mechanischer Stabilität. Entweder man intgeriert den Stick in das Gehäuse der CAT und fixiert ihn da oder man „schient“ ihn mit einer kleinen Leiste und Kabelbindern, so dass die Eingangsbuchsen nicht beansprucht werden.
Nützliche Extras
Da ich den PC nicht nur zum Funken nutze sondern gelegentlich auch mal ein Video ansehe oder eine Runde Morserunner absolviere habe ich mit ein paar Relais eine Umschaltmöglichkeit für Soundstick und Kopfhörer eingebaut.

An die CAT werden angesteckt: der Ein- und Ausgang des Soundsticks, der Kopfhörer und bei Bedarf ein Mikrofon sowie der Kopfhörerausgang des TRX.
Ist die Station am „Hauptschalter“ ausgeschaltet oder der Schalter S1 ist offen, wird der Soundstick direkt zur Kopfhörer- und Mikrofonbuchse an der Frontplatte der CAT durchgereicht, Das entspricht dem „Rechnerbetrieb“ – Musik hören, Skypen usw. Es werden jeweils beide Audiokanäle und die Masse geschaltet.
Wird S1 bei eingeschalteter Station geschlossen, wird der Kopfhörer auf den Kopfhörerausgang des TRX geschaltet und die CAT bekommt den Zugriff auf den Soundstick. Solange S2 noch offen ist, wird auch bei anliegendem Audiosignal vom Rechner noch nicht gesendet, die PTT-Platine ist abgeschaltet. Diese Stellung wird für CW oder Fonie-QSOs genutzt. Wird S2 zugeschaltet, ist die NF-VOX in der CAT sendebereit.
Die Betriebszustände werden durch drei LEDs angezeigt. Alle LEDs aus = Rechnerbetrieb, grüne LED leuchtet = TRX am Kopfhörer, eine gelbe LED leuchtet zusätzlich= Bereit zum Senden mit NF-VOX und eine rote LED = TRX ist auf Sendung. Mit 12V ziehen die drei 5V Relais in Serie sicher an.
Die Möglichkeit, den Mithörton nicht von der Kopfhörerbuchse sondern vom Audiozweig der CAT zu erzeugen habe ich nach einigen Experimenten verworfen. Der TRX konnte das einfach besser.
Ergebnisse
Die einzelnen Funktionsblöcke wurden auf Lochrasterplatinen aufgebaut und solange daran geändert, bis sie zur Zufriedenheit funktionierten. Danach wurde alles in ein einfaches Plastikgehäuse eingebaut und dabei ist es bis heute geblieben. Besser wäre natürlich ein kompakter Aufbau auf einer Leiterplatte mit SMD-Bauteilen. Probleme mit HF-Einstrahlung traten selbst bei QRO-RTTY nicht auf. Das USB-Kabel zum Soundstick wurde vorsichtshalber direkt vor dem Soundstick um einen größeren Ferritkern gewickelt. Die Aussendungen wurden von den Gegenstationen auf Anfrage stets als sauber bewertet. Der Materialbedarf konnte nahezu vollständig aus der Bastelkiste gedeckt werden. Das Arbeiten mit nur einem Kopfhörer für alle Zwecke führt zu etwas mehr Ordnung im Shack. Die Bedienung der einzelnen Decoder wird durch die beiden Pegelregler im Audioteil vereinfacht und ungewollte Aussendungen kann es nicht mehr geben,wenn man sich daran gewöhnt hat die PTT nur dann zuzuschalten, wenn man wirklich Digitalbetrieb machen will.
Viel Spaß beim Experimentieren und beim Entwurf der eigenen CAT wünscht Matthias, DD7NT !
/1 /http://www.wikipedia.de Suchwort RS232
/2/ http://bstw.mpcwin.de/Download/Dateien/Nullmodemkabel.pdf
/3/ http://icom.custhelp.com/app/answers/detail/a_id/1835/kw/CI-V
/4/ HAM Radio Deluxe – Interfacing – a basic guide to CAT and audio interfacing
/5/ https://sourceforge.net/projects/com0com/
/6/ https://www.virtual-serial-port.org/de/virtual-null-modem/
/7/ Einfaches aber cleveres Soundinterface mit NF-VOX, Dr.-Ing. Werner Hegewald DL2RD in FA 8/2014 S. 866
/8/ http://sinegen.en.lo4d.com/details
/9/ www.box73.de
/10/ http://spectrogram.software.informer.com/16.0/
Quelltext NFVOX
https://funkamateure-dresden-ov-s06.de/wp-content/uploads/wppa-source/album-9/nfvox.pdf